
Cài đặt PID cho biến tần LS IG5A
Cài đặt PID cho biến tần LS IG5A
1.Hướng dẫn cài đặt thông số PID gọi bơm phụ trên biến tần IG5A.
Chức năng này dùng để bù áp khi chạy bơm PID mà lượng tiêu thụ thường xuyên cao hơn công suất thiết kế bơm chính.
- Hàm A11=1 Cho phép biến hoạt động chế độ MMC. (Gọi bơm phụ)
- Hàm A12=2 chọn số bơm phụ được sử dụng.
- (Cho phép tùy chọn 1 hoặc 2 bơm)
- Hàm A13=45Hz Tần số cho phép gọi bơm phụ 1. (Cho phép cài từ tần số A15 ~ F21)
- Hàm A14=50Hz Tần số cho phép gọi bơm phụ 2. (Cho phép cài từ tần số A16 ~ F21)
- Hàm A15=35Hz Tần số cho phép bơm phụ 1 dừng. (Cho phép cài từ tần số 0~ A13)
- Hàm A16=30Hz Tần số cho phép bơm phụ 2 dừng. (Cho phép cài từ tần số 0~ A14)
- Hàm A17=5.0 (S)giây Cài thời gian chờ trước khi khỏi động bơm phụ. (Cho phép cài từ tần số 0.1~ 600.0S)
- Hàm A18=5.0 (S)giây Cài thời gian chờ trước khi tắt bơm phụ. (Cho phép cài từ tần số 0.1~ 600.0S)
- Hàm A19=5.0 (S)giây Cài thời gian tăng tốc của bơm chính khi bơm phụ tắt. (Cho phép cài từ tần số 0.1~ 600.0S)
- Hàm A20=5.0 (S)giây Cài thời gian giảm tốc của bơm chính khi bơm phụ khỏi động. (Cho phép cài từ tần số 0.1~ 600.0S)
- Hàm A21= 0 (NO) Cho phép bơm phụ tắt cùng lúc khi có thỏa điều kiện cài đặt.( Nếu Hàm A21= 1 (YES) Cho phép bơm phụ tắt theo thứ tự.)
- Hàm A22= 0 (kiểu FIFO) / 1 (kiểu FILO)
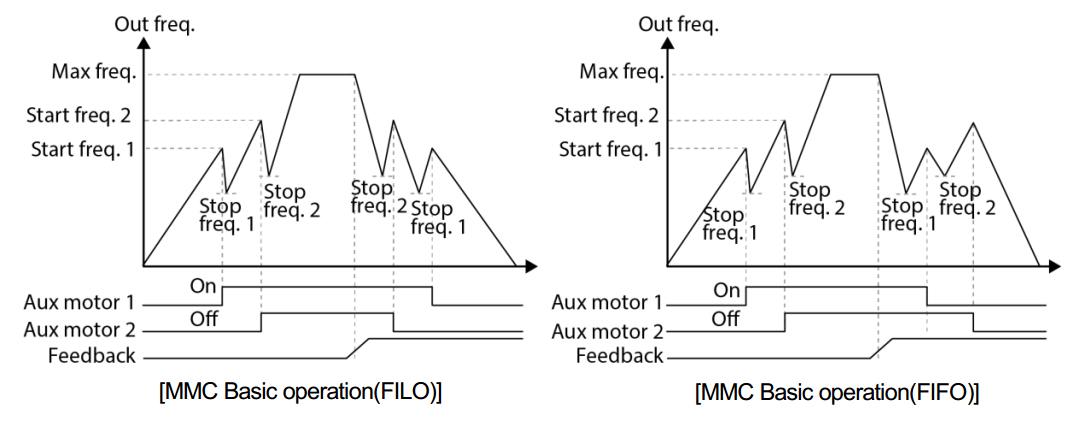
- Hàm A26=1 Cho phép bơm phụ 1 khỏi động đầu tiên. (Cho phép tùy chọn bơm1 hoặc bơm 2.)
- Hàm I-54 = 25 Cho phép relay 1 trên biến tần điều khiển bơm phụ 1.
- Hàm I-55 = 26 Cho phép relay 2 trên biến tần điều khiển bơm phụ 2.

2. Hướng dẫn cài đặt PID IG5H.
- Bước 1:Vào nhóm Drive của biến tần LS (IG5A)
- Vào H93 cài lên 1 nhấn ENT 2 lần trả các thông số về ban đầu của nhà sản xuất
- Vào hàm drv : Chọn “1” _Chạy thuận/nghịch bằng công tắc ngoài trên biến tần LS .
- Vào hàm Frq : Chọn “0”_Cho phép cài tần số trên bàn phím của biến tần LS.
- Vào hàm ACC=10s : Cài giá trị “0~6000”(Sec)_ Thời gian tăng tốc cho biến tần LS.
- Vào hàm dEC=20s : Cài giá trị “0~6000”(Sec)_ Thời gian giảm tốc cho biến tần LS.
Bước 2:Vào nhóm Function 1 của biến tần LS
- Vào hàm F1 : Chọn “0” _Cho phép biến tần LS chạy thuận và nghịch .
- Chọn “1”_Không cho phép biến tần LS chạy thuận.
- Chọn “2”_Không cho phép biến tần LS chạy nghịch.
- Vào hàm F21= 50Hz : Cài “40~400”(Hz)_Cài tần số Max cho biến tần LS hoạt động (thường cài bằng tần số lưới điện).
- Vào hàm F22=50Hz : Cài “30~400”_Cài đặt tần số cơ bản cho biến tần LS (thường cài bằng tần số F21).
Bước 3:Vào nhóm Function 1 và 2 của biến tần LS
- Hàm F4 : Chọn “0”_Cho phép biến tần LS dừng theo kiểu Decelerate. Chọn “2”_Cho phép dừng theo kiểu Free run
- Hàm F5 : Chọn “1”_Cho phép biến tần LS chạy khi vừa cấp nguồn (công tắc ngoài đang ở chế độ chạy thuận(Fx) hoặc chạy nghịch (Rx)).
- Hàm F6=3.0s : Cài thời gian delay chạy lại khi có nguồn.
Bước 4: Cài chức năng PID IG5H
Bước 4.1: – Vào H49 cài lên 1 Cho phép sử dụng PID
Bước 4.2: Lựa chọn tín hiệu hồi tiếp
- H50 = 1 ; hồi tiếp điện áp (0 – 10V)
- H50 = 0 ; hồi tiếp dòng điện (0 – 20mA) (Mặc định nhà SX)
- H51=300: P Khâu tỉ lệ.
Vì sai số xác lập của hệ thống tỉ lệ nghịch với P nên : P càng lớn thì sai số xác lập càng nhỏ, hệ thống sẽ ổn định. P không được vượt quá Pgh ( vì sai số xác lập
không bao giờ bằng 0) ( phụ thuộc cấu trúc hệ thống)
-H52=1.0;I Khâu tích phân. Thông số này cải thiện sai số xác lập, chống nhiễu tần số cao
-H53=0; D Khâu vi phân.Thông số này cải thiện đáp ứng quá độ, rất nhạy với nhiễu tần số cao
Thông thường chỉ cần cài 2 thông số PI , thông số D cài về 0 sec
Bước 4.3: Chọn tính năng hỗ trợ chạy tay.
- -H54 = 0: Chức năng chạy tay được cài trong hàm rEF.
- -H54 = 1: Chức năng chạy tay độc lập hoạt động theo hàm Frq.
Bước 4.4: Cài tần số giới hạn chạy PID.
- H55 = 50Hz: Cài tần số giới hạn trên.
- H56 = 20Hz: Cài tần số giới hạn dưới.
Bước 4.5: Cài đặt tần số tham chiếu (tần số để so sánh)
- H57 = 0 : sử dụng keypad 1 để cài (Mặc định nhà SX)
- H57 = 1 : sử dụng keypad 2 để cài
- H57 = 2 : sử dụng analog V1 để cài
- H57 = 3 : sử dụng analog I1 để cài
- H57 = 4 : sử dụng truyền thông RS485-RTU.
Bước 4.6: Chọn đơn vị điều khiển PID
- H58 = 0 ; sử dụng đơn vị Hz
- H58 = 1 ; sử dụng đơn vị % (Mặc định nhà SX)
- Vào rEF của drive group cài tần số/% giá trị tham chiếu như mong muốn.
Bước 4.7: Chọn kiểu điều khiển PID.
- -H59 = 0 điều khiển PID thuận.
- -H59 = 1 điều khiển PID ngược.
Bước 4.8: Cài đặt giá trị tham chiếu (rEF).
- Ví dụ: Ta có cảm biến áp suất 10bar out 4-20mA. Thì tại 10bar là 100%. Chúng ta cài 50% tương ứng biến tần duy trì áp ở 5bar. Ta sẽ cài
- Hàm rEF=50% biến tần sẽ chạy theo giá trị được cài ở hàm này.
- Để kiểm tra xem giá trì cảm biến có đưa về biến tần không ta vào
- Hàm Fbk kiểm tra gía trị hồi tiếp (Feedback) trong nhóm hàm drive (Nhóm đầu tiên).
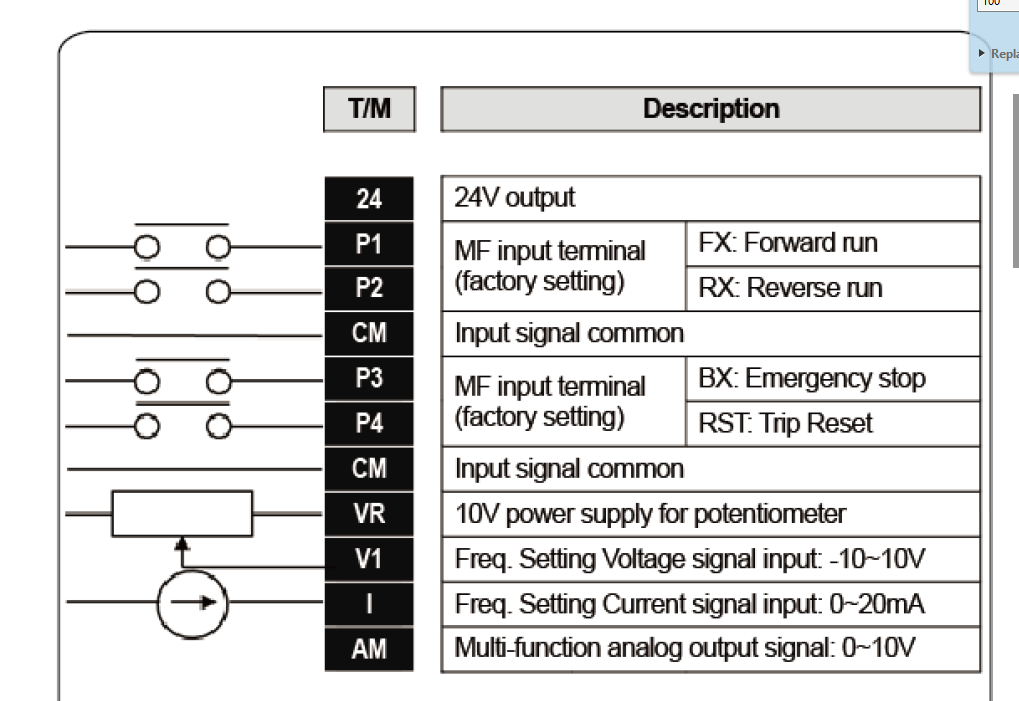
Sơ đồ kết nối biến tần LS.
- Chân CM là chân chung cho tín hiệu ngỏ vào của biến tần LS.
- Chân P1 “FX” Chân chạy thuận biến tần LS.
- Chân P2 “RX” Chân chạy nghịch biến tần LS.
- Chân 24 là chân điện áp 24VDC 100mA gắn chân dương (1) cảm biến áp suất out 4-20mA.
- Chân I chân nhận tín hiệu Analog 4-20mA, chân nhận tín hiệu từ chân (2) cảm biến áp suất.
Cài đặt PID cho biến tần LS IG5A
|
Các thông số cài đặt. a. Cài đặt các tham số cơ bản. Cài đặt các tham số cơ bản cho biến tần, điều điển ON/OFF biến tần dùng cổng P1. b. Cài đặt các tham số PID.
Chú ý: “-“là giá trị biến đổi còn tùy vào hệ thống, cần kiểm tra hệ thống để lựa chọn cho phù hợp. Khi chạy, cần kiểm tra hai thông số sau.
|
Industrial AC Drives
HVAC Drives
Machine Controllers
Sigma-7 Servo Products
Sigma-5 Servo Products
Motoman Robot
MV Drive
Yaskawa, Yaskawa A1000, Yaskawa GA700, Yaskawa E1000, Yaskawa V1000, Yaskawa J1000
