

Giới thiệu bộ điều khiển động cơ servo mitsubishi MR-J5-10G

Thông tin chung MR-J5-10G
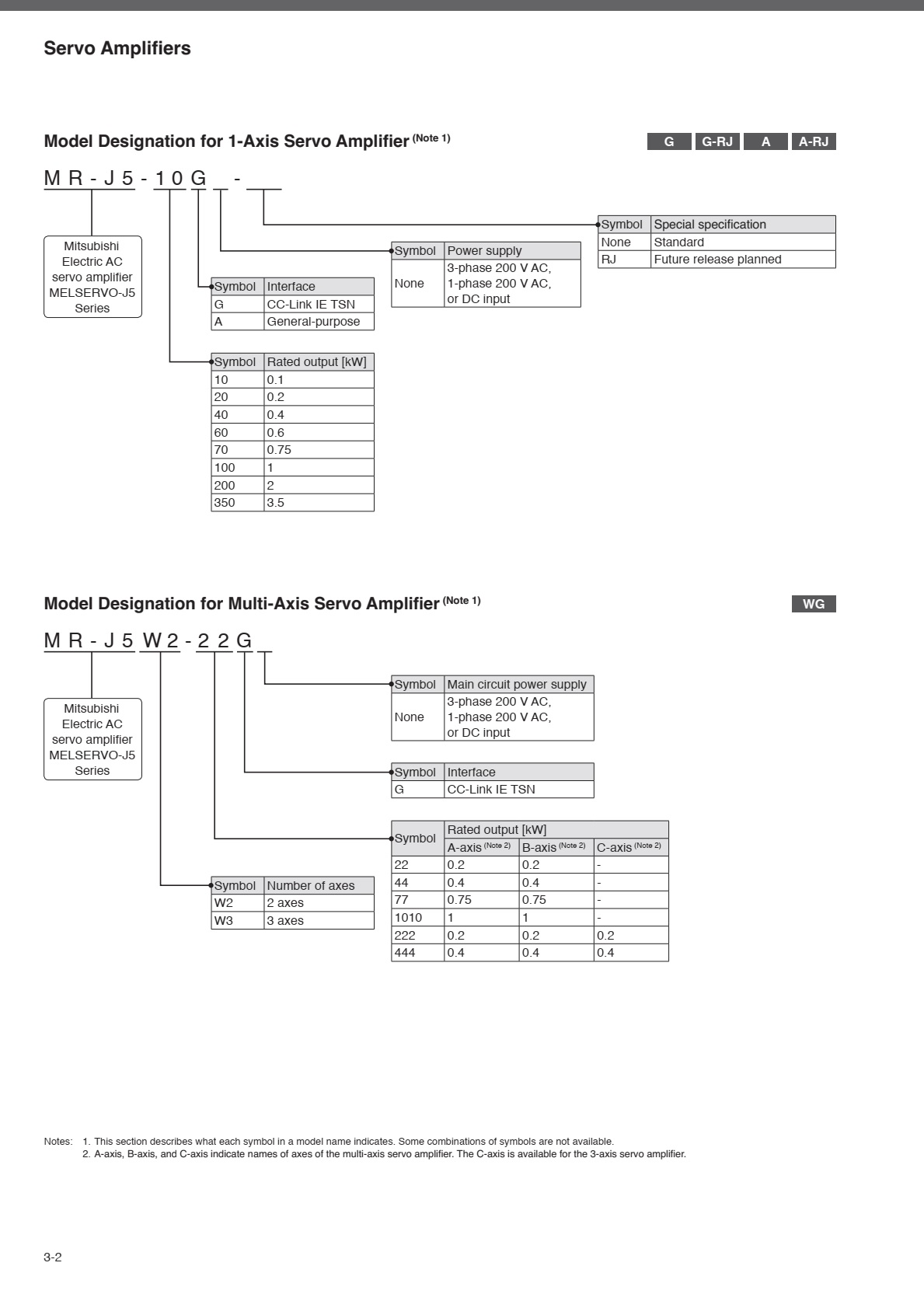
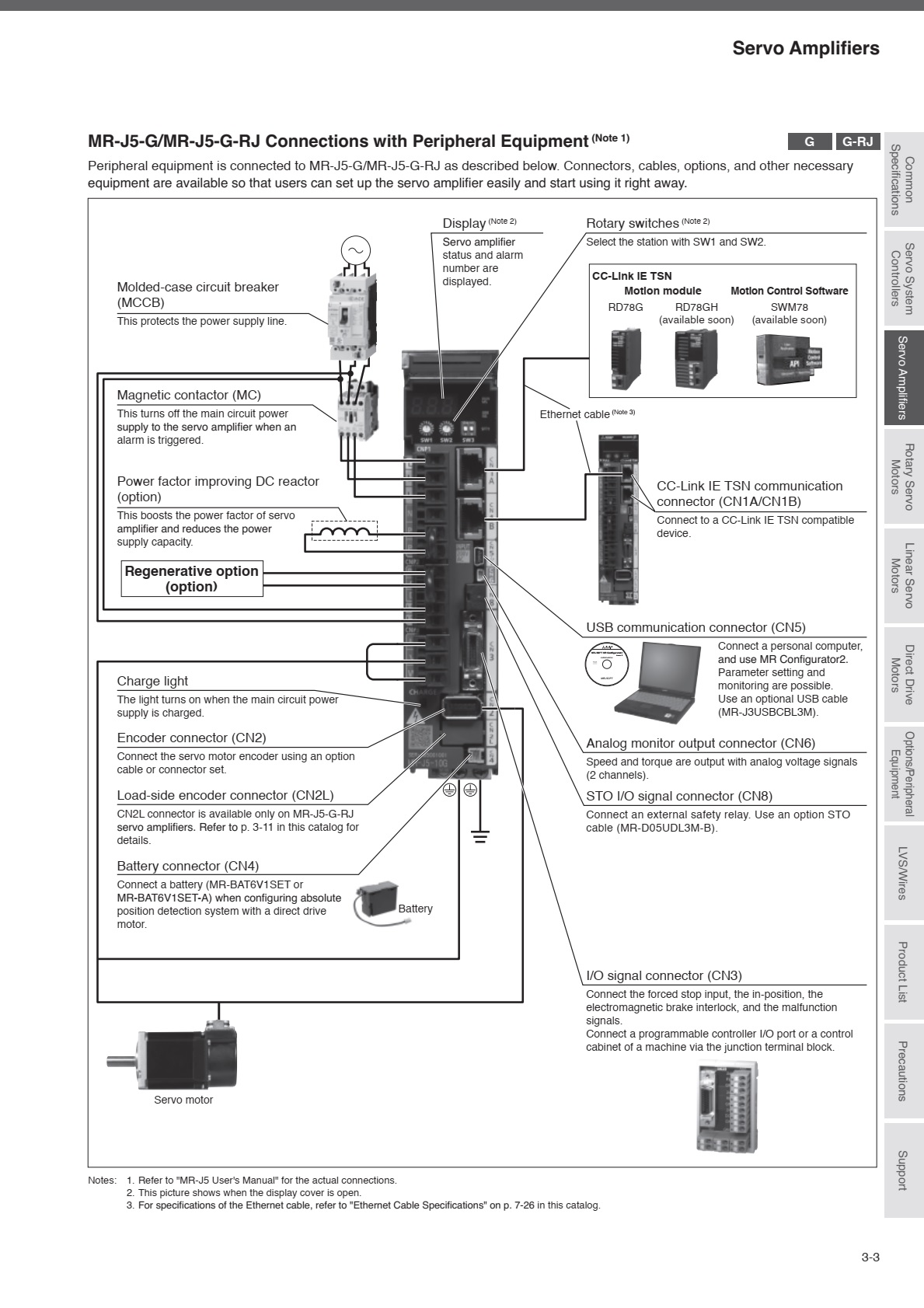
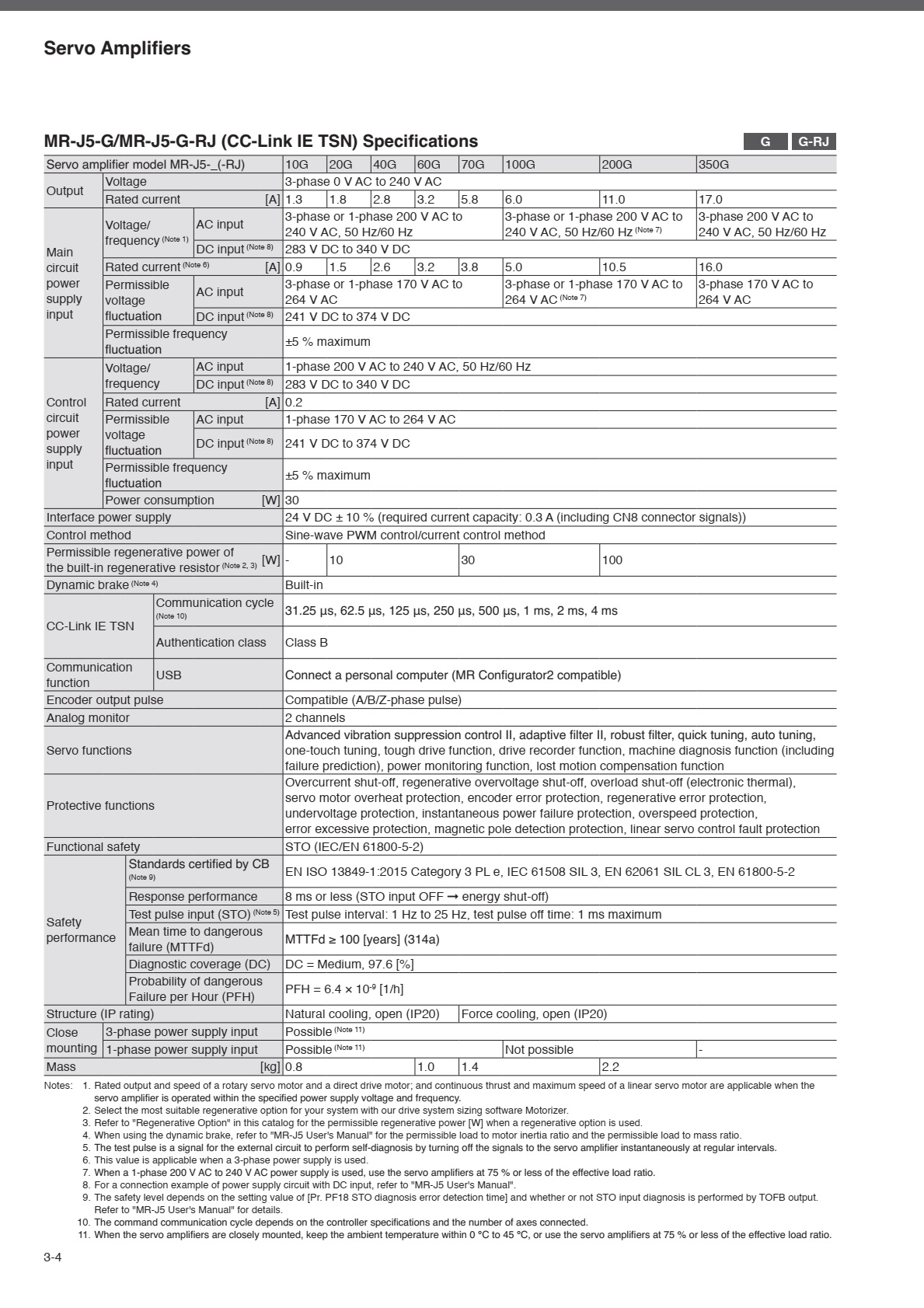
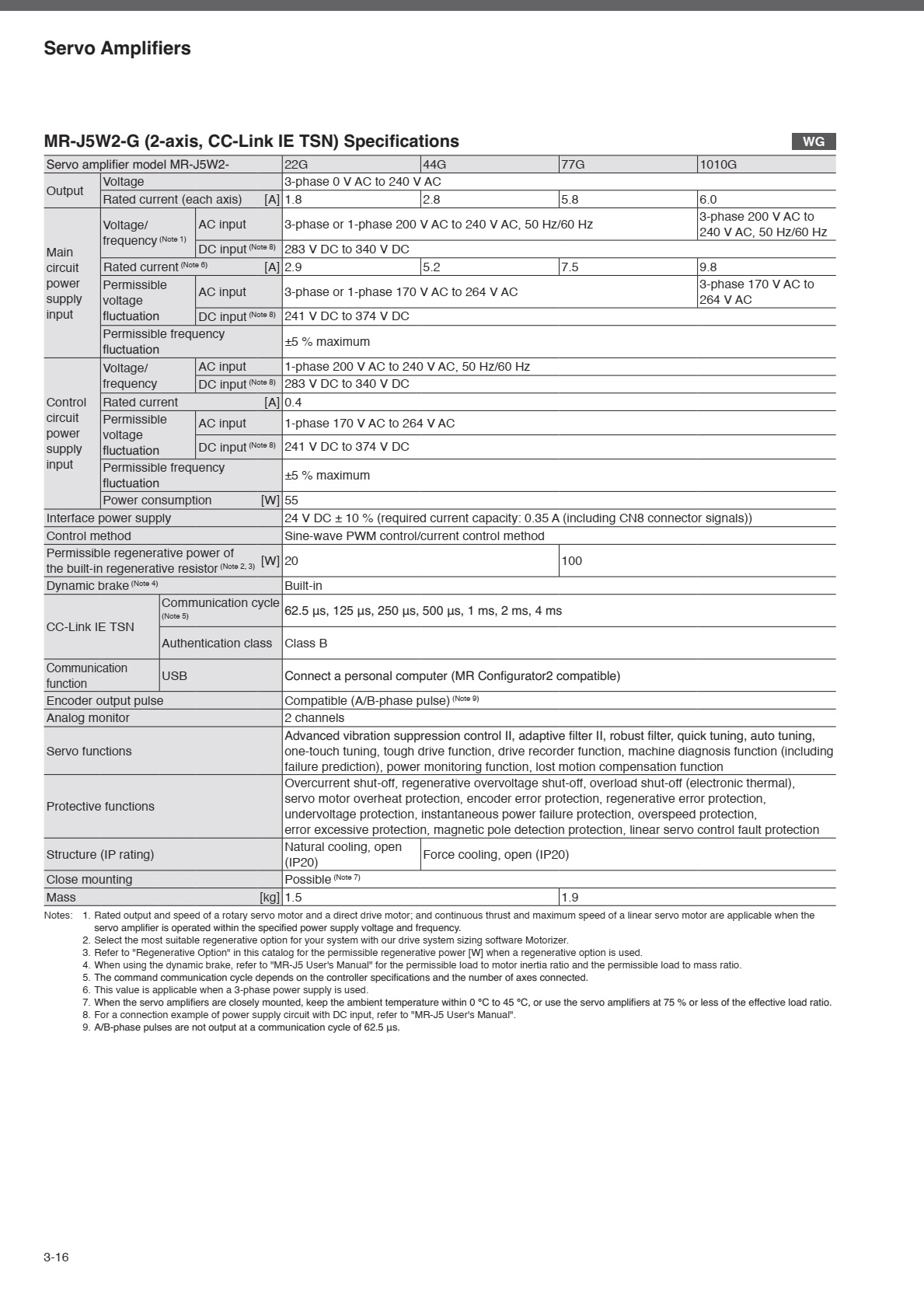
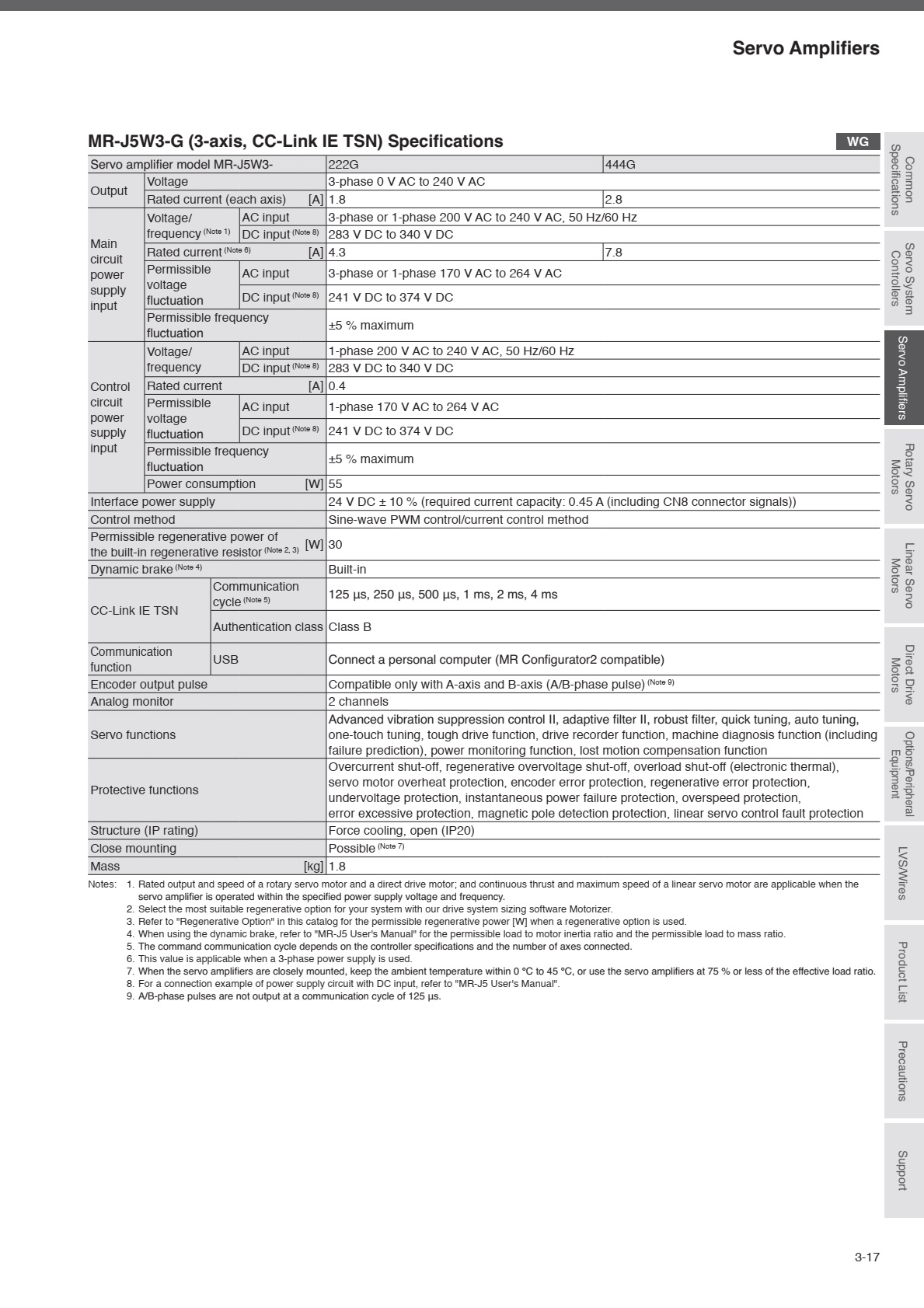
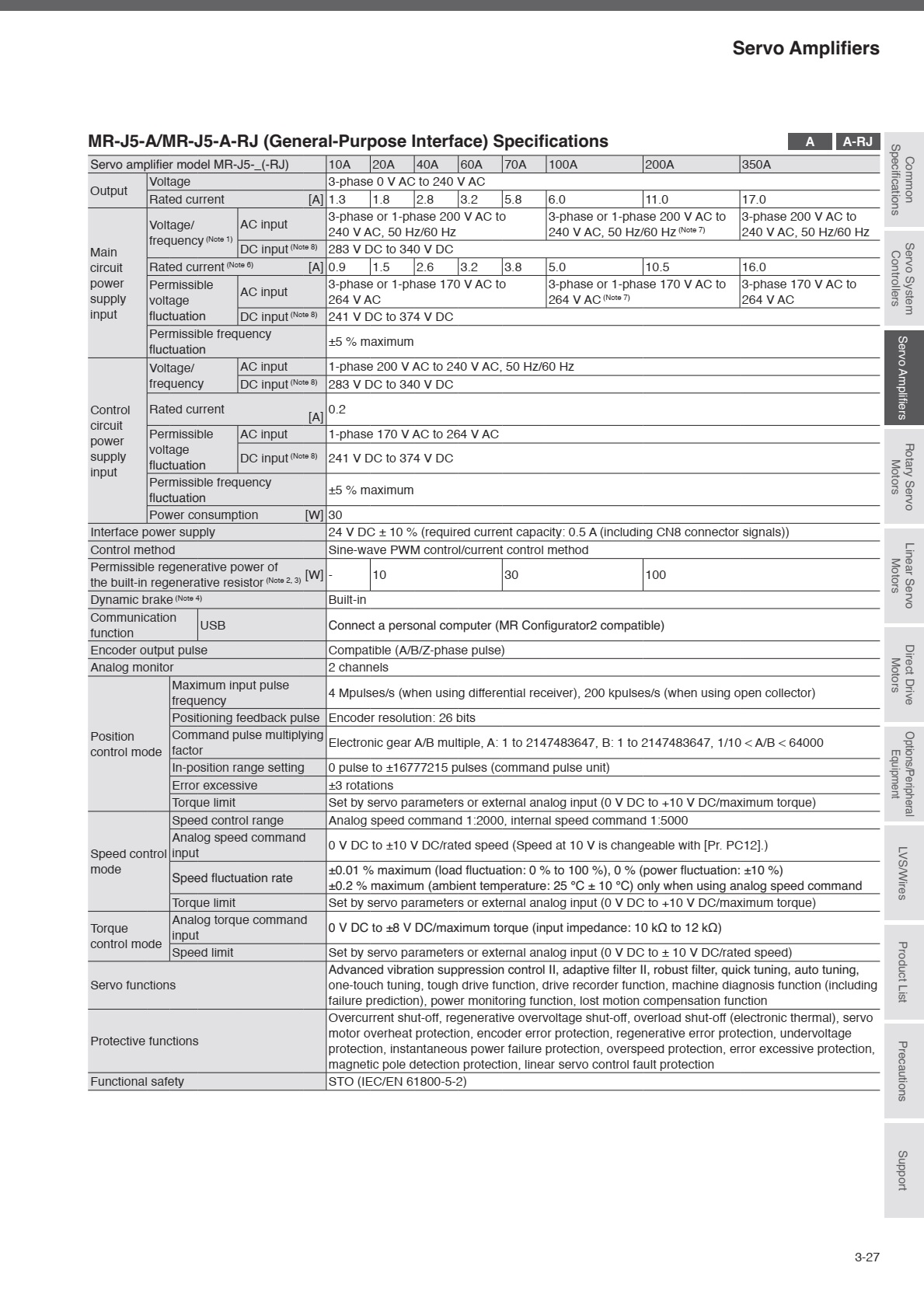
Biến tần servo MR-J5-10G hay bộ điều khiển động cơ servo Mitsubishi MR-J5-10G có dòng vào định mức 1.3A, điện áp ra 3 pha 0-240VAC, dòng ra định mức 1.3A, giao diện CC-Link IE TSN.
Thiết bị MR-J5-10G Mitsubishi sở hữu nhiều chức năng khác nhau nên được ứng dụng phổ biến trong hệ thống tự động trong công nghiệp. Bảng sau đây sẽ cung cấp thông tin về sản phẩm.
Thông số kỹ thuật hệ thống servo điện AC MR-J5-10G Mitsubishi
| Tên sản phẩm | Servo điện AC MR-J5-10G Mitsubishi |
| Dòng | MELSERVO-J5 |
| Công suất động cơ | 0.1kW |
| Dòng ra định mức | 1.3A |
| Dòng vào định mức | 0.9A |
| Giao diện kết nối | CC-Link IE TSN |
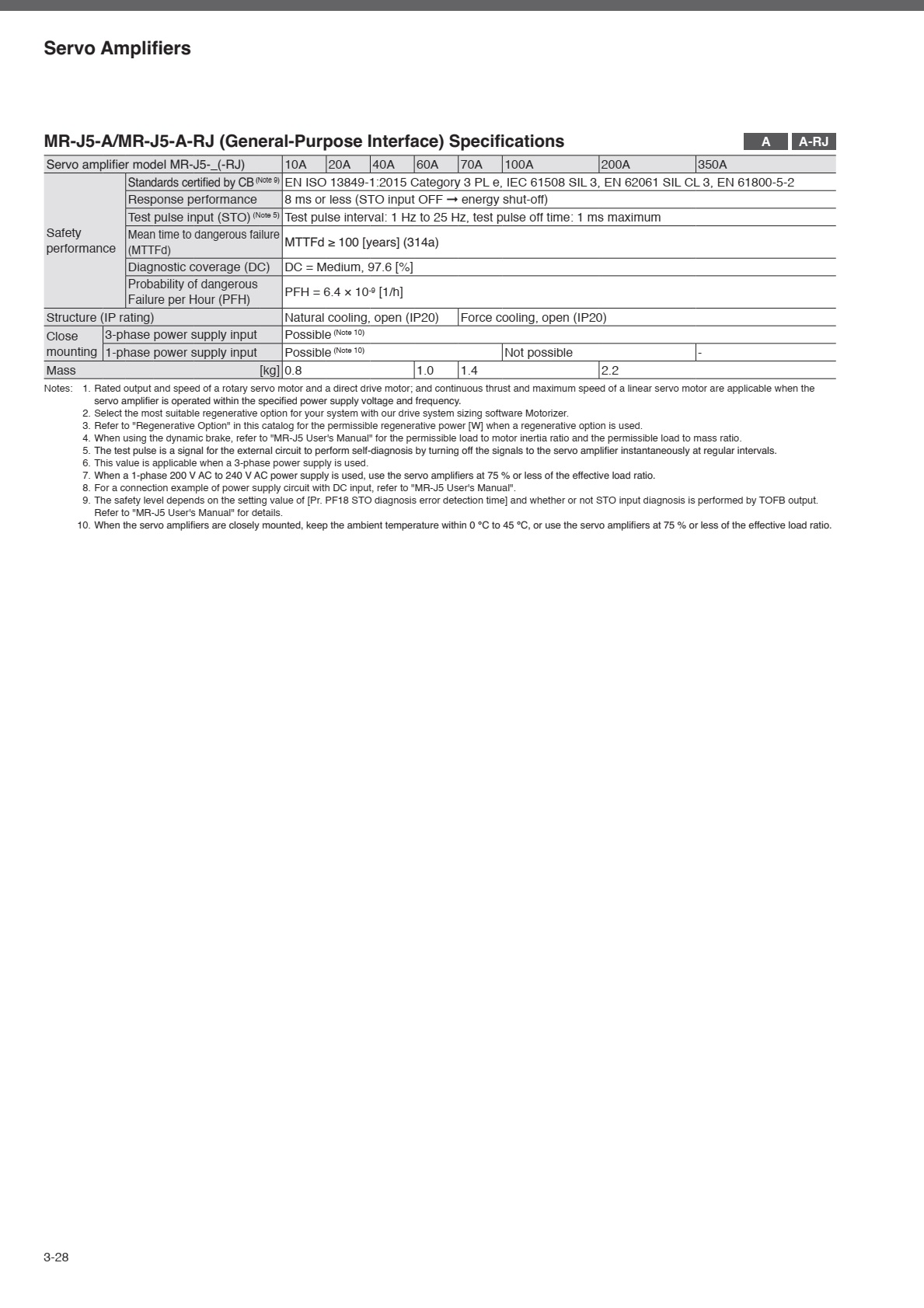
| Làm mát | Làm mát tự nhiên |
| Trọng lượng | 0.8kg |
| Hãng sản xuất | Mitsubsihi |
Asiame.vn chuyên phân phối Biến tần servo MR-J5-10G Mitsubishi giá tốt – chính hãng – bảo hành 12 tháng – giao hàng tận nơi. Mọi thông tin về AC MR-J5-10G Mitsubishi liên hệ để được tư vấn và hỗ trợ
Hướng dẫn cài đặt Biến tần servo Mitsubishi MR-J5-10G
Hướng dẫn chạy JOG Biến tần servo Mitsubishi MR-J5-10G
- Để chạy jog servo Mitsubishi MR J4 100B các bạn cần phải bật tín hiệu servo ON.
- Đầu tiên các bạn nhấn phím MODE sau bấm bấm phím XUỐNG để hiện ra “TEST1” sau đó bấm giữ phím SET đến khi màn hình hiển thị d-01 là được.
- Giờ các bạn bấm phím XUỐNG hoặc LÊN để tiến hành chạy jog tới lùi cho động cơ.
- Cách cài đặt thông số cho servo Mitsubishi MR-J5-10G
- Những thông số cài đặt của servo Mitsubishi thường có dạng XXXX trong đó tính từ phải qua trái các bit sẽ có thứ tự từ 0=>3.
- Ví dụ như PA01.0 có nghĩa là bit thứ 1 từ bên phải qua. AAAX có nghĩa là có bạn chỉ cần cài bit X mà không cần quan tâm tới 3 bit còn lại.
Hướng dẫn cài đặt servo Mitsubishi MR-J5-10G chạy chế độ vị trí
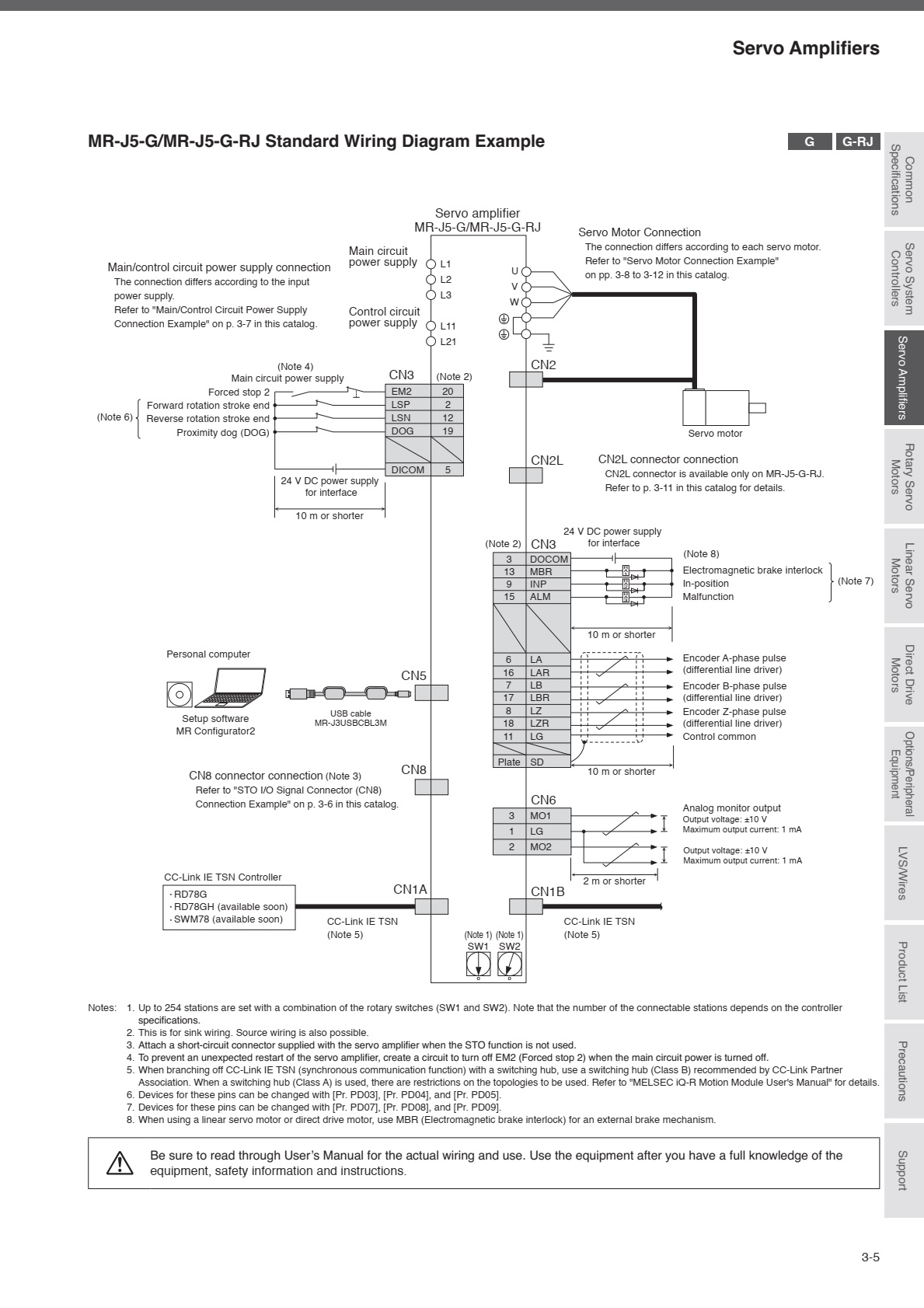
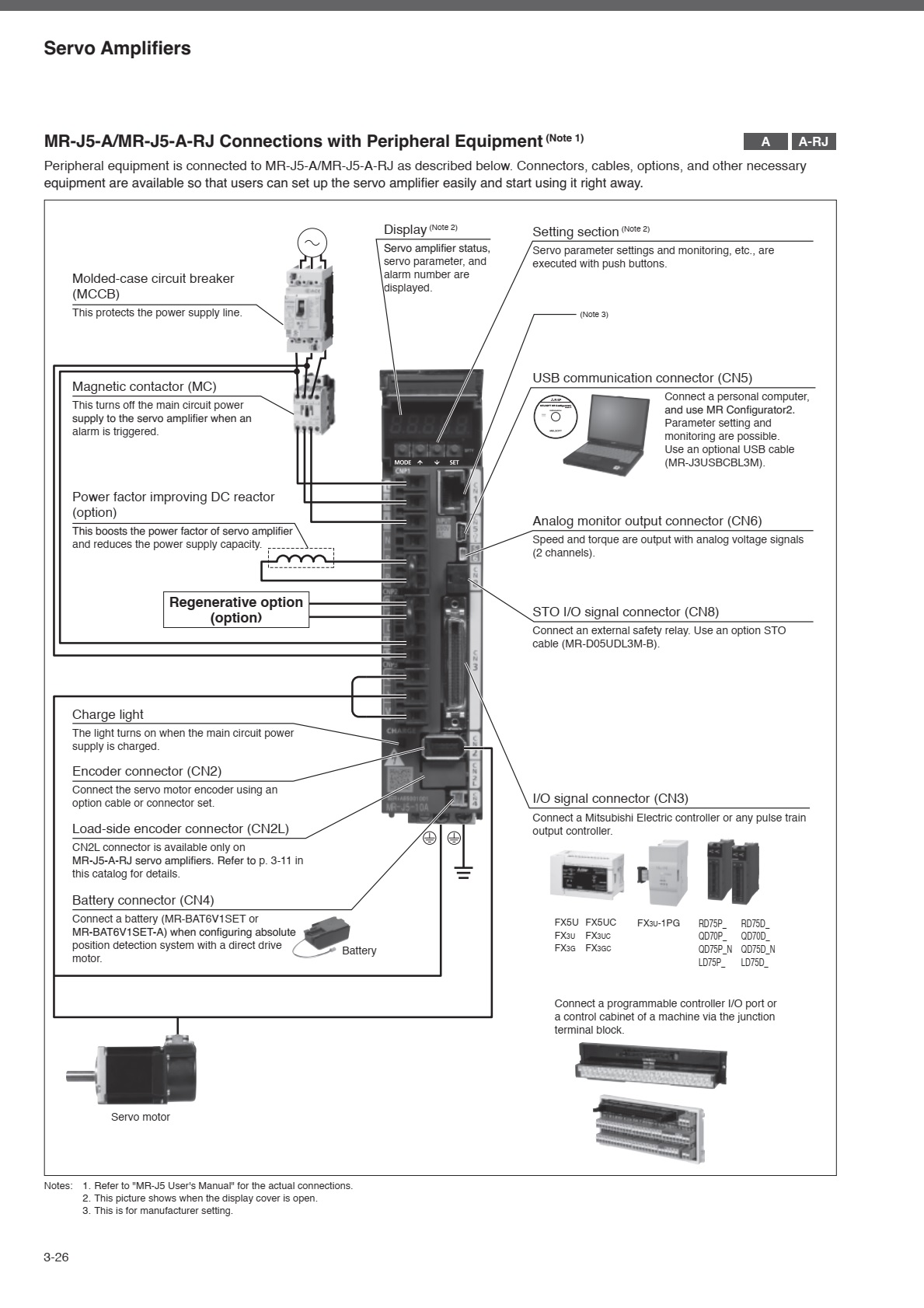
- Về sơ đồ đấu dây các bạn chủ yếu sử dụng 6 dây điều khiển như sau: chân Pulse+ là số 10, chân Pulse- là số 11, Sign+ là số 35, chân Sign- là chân số 36.
- Lưu ý chân xung hướng của servo nhận xung 5v nên muốn sử dụng với điện áp 24v các bạn cần phải gắn nối tiếp trở 2.2kOhm và chân này.
- Còn lại nối chân 20 lên +24v và chân 15 và 0V để tạo tín hiệu servo.
- Chọn chế độ điều khiển điều khiển vị trí: PA01.0=0. MR-J5-10G
- Chọn chế độ nhận xung hướng các bạn cài PA13.0, thường mặc định thì cài bit này bằng 0.
- Cài đặt hộp số điện tử với tử số là PA06 và mẫu số là PA07.
- Tham khảo bài viết sau để biết cách cài đặt hộp số điện tử: hướng dẫn cài đặt hộp số điện tử cho servo
Hướng dẫn cài đặt servo Mitsubishi MR-J5-10G chạy ở chế độ điều khiển tốc độ
- Về sơ đồ đấy dây các bạn sử dụng 2 chân 2-28 để cấp điện áp tham chiếu cho tốc độ. Lưu ý nguồn cấp cho 2 chân này dưới 10V và có điện áp âm.
- Ví dụ khi điện áp +5v thì servo chạy tới 50% tốc độ max, còn khi điện áp -5V thì servo chạy lùi với tốc độ 50% định mức.
- Cài đặt PA01.0=2 tức là XX0X để chọn chế độ vị trí. MR J4 200A
- Cài đặt điện áp cho tốc độ tối đa ở Pc12. Ví dụ sử dụng nguồn 10V thì các bạn cài thành 10.00 còn sử dụng nguồn 5V thì các bạn cài thành 5.00.
- Thời gian tăng giảm tốc các bạn cài ở PC01 và Pc02.
Mô tả một số lỗi chi tiết của servo Mitsubishi MR-J5-10G
- AL.32: lỗi quá dòng nguyên nhân có thể do kết nối dây cáp động lực U V W chưa đúng, cảm biến dòng lỗi hoặc hư hỏng igbt board công suất của driver.
- AL.33: lỗi quá điện áp, đo đặc điện áp cấp nguồn của driver hoặc tăng thời gian tăng giảm tốc cài đặt trên driver hoặc bộ điều khiển.
- AL.10: lỗi thấp áp, do nguồn đầu vào driver hoặc do driver bị lỗi phần cứng.
- AL.50 AL.51 : là lỗi quá tải các bạn nên kiểm tra lại đấu nối U V W hoặc do tải quá nặng kiểm tra lại phần cơ khí.
- AL.16 AL.1`E AL.1F AL.20 AL.21: lỗi chưa kết nối encoder hoặc cáp encoder bị lỏng. Lỗi này cũng có thể do encoder trên motor hi hỏng hoặc jack nhận encoder trên driver bị hỏng.
Các sản phẩm phân phối kinh doanh chính :
Chúng tôi trân trọng cảm ơn Quý khách hàng đã quan tâm và sử dụng sản phẩm dịch vụ của chúng tôi và mong muốn đồng hành cùng sự phát triển của Quý khách hàng

![Biến tần servo mitsubishi MR-J4 Servo Mitsubishi MR-J4 Series là dòng Servo mới nhất của Mitsubishi với nhiều tính năng vượt trội. Dòng Servo này mang lại hiệu quả cao nhờ tốc độ bus mạng SSCNET III/H III/H 0.222 ms, 0.444 ms, 0.888 ms nhanh hơn gấp 3 lần so với những giải pháp cũ. Dễ kết nối hơn và giảm tối đa năng lượng tiêu thụ nhờ nguồn năng lượng tái tạo. Số trục có thể điều khiển tối đa lên tới 3 trục. Độ phân giải Encoder lên tới 22 bit (4 triệu xung mỗi vòng quay). Tốc độ tối đa lên tới 6000rpm. Có 3 chế độ điều khiển là vị trí, tốc độ và momen. . Biến tần servo mitsubishi MR-J4-A MR-J4-10A MR-J4-20A MR-J4-40A MR-J4-60A MR-J4-70A Thông số đầu ra - Output Điện áp Rated voltage 3-phase 170 V AC Dòng điện Rated current 1.1 1.5 2.8 3.2 5.8 Nguồn cấp đầu vào Main circuit power supply Điện áp/ Tần số Voltage/frequency 3-phase or 1-phase 200 V AC to 240 V AC 50/60 Hz Dòng điện Rated current 0.9 1.5 2.6 3.2 3.8 Permissible voltage fluctuation 3-phase or 1-phase 170 V AC to 264 V AC Permissible frequency fluctuation ±5% maximum Nguồn cấp cho phần điều khiển Control circuit power supply Điện áp/ Tần số Voltage/frequency 1-phase 200 V AC to 240 V AC, 50/60 Hz Dòng điện Rated current 0.2 Permissible voltage fluctuation 1-phase 170 V AC to 264 V AC Permissible frequency fluctuation ±5% maximum Power consumption [W] 30 Interface power supply 24 V DC ± 10% (required current capacity: 0.3 A (including CN8 connector signal)) Phương pháp điều khiển Control method Sine-wave PWM control/current control method Sai số điện trở Tolerable regenerative power of the built-in regenerative resistor - 10 10 10 20 Bộ hãm động năng Dynamic brake Built-in (Note 4) Chức năng kết nối Communication function USB: Connect a personal computer (MR Configurator2 compatible) RS-422: 1 : n communication (up to 32 axes) (Note 11) Xung dầu ra Encoder output pulse Compatible (A/B/Z-phase pulse) Giám sát tín hiệu tương tự Analog monitor 2 channels Chế độ điều khiển vị trí Position control mode Maximum input pulse frequency 4 Mpps (when using differential receiver), 200 kpps (when using open-collector) Positioning feedback pulse Encoder resolution: 22 bits Command pulse multiplying factor Electronic gear A/B multiple, A: 1 to 16777216, B: 1 to 16777216, 1/10 < A/B < 4000 Positioning complete width setting 0 pulse to ±65535 pulses (command pulse unit) Error excessive ±3 rotations Torque limit Set by parameters or external analog input (0 V DC to +10 V DC/maximum torque) Chế độ điều khiển vận tốc Speed control mode Speed control range Analog speed command 1:2000, internal speed command 1:5000 Analog speed command input 0 V DC to ±10 V DC/rated speed (Speed at 10 V is changeable with [Pr. PC12].) Speed fluctuation rate ±0.01% maximum (load fluctuation 0% to 100%), 0% (power fluctuation: ±10%) ±0.2% maximum (ambient temperature: 25 °C ± 10 °C) only when using analog speed command Torque limit Set by parameters or external analog input (0 V DC to +10 V DC/maximum torque) Chế độ điều khiển lực xoắn Torque control mode Analog torque command input 0 V DC to ±8 V DC/maximum torque (input impedance: 10 kΩ to 12 kΩ) Speed limit Set by parameters or external analog input (0 V DC to ± 10 V DC/rated speed) Chế độ điều khiển vòng kín toàn hoàn Fully closed loop control Available in the future Load-side encoder interface Mitsubishi high-speed serial communication Chức năng bảo vệ của MR-J4 Protective functions Overcurrent shut-off, regenerative overvoltage shut-off, overload shut-off (electronic thermal), servo motor overheat protection, encoder error protection, regenerative error protection, undervoltage protection, instantaneous power failure protection, overspeed protection, error excessive protection Safety function STO (IEC/EN 61800-5-2) Safety performance Standards certified by CB EN ISO 13849-1 Category 3 PL d, EN 61508 SIL 2, EN 62061 SIL CL 2, EN 61800-5-2 SIL 2 Response performance 8 ms or less (STO input OFF → energy shut-off) Test pulse input (STO) (Note 7) Test pulse frequency: 1 Hz to 25 Hz Test pulse off time: 1 ms maximum Mean time to dangerous failure (MTTFd) 100 years or longer Diagnostic coverage (DC) Medium (90% to 99%) Probability of dangerous Failure per Hour (PFH) 1.68 × 10-10 [1/h] Compliance to standards Refer to "Conformity with global standards and regulations" on p. 22 in this catalog. Structure (IP rating) Natural cooling, open (IP20) Force cooling, open (IP20) Close mounting Possible (Note 6) Khối lượng Mass [kg] 0.8 0.8 1.0 1.0 1.4 Biến tần Servo Mitsubishi MR-J4-A MR-J4-100A MR-J4-200A MR-J4-350A MR-J4-500A MR-J4-700A Output Rated voltage 3-phase 170 V AC Rated current [A] 6.0 11.0 17.0 28.0 37.0 Main circuit power supply Voltage/frequency (Note 1) 3-phase 200 V AC to 240 V AC 50/60 Hz Rated current [A] 5.0 10.5 16.0 21.7 28.9 Permissible voltage fluctuation 3-phase 170 V AC to 264 V AC Permissible frequency fluctuation ±5% maximum Control circuit power supply Voltage/frequency 1-phase 200 V AC to 240 V AC, 50/60 Hz Rated current [A] 0.2 0.3 Permissible voltage fluctuation 1-phase 170 V AC to 264 V AC Permissible frequency fluctuation ±5% maximum Power consumption [W] 30 45 Interface power supply 24 V DC ± 10% (required current capacity: 0.3 A (including CN8 connector signal)) Control method Sine-wave PWM control/current control method Tolerable regenerative power of the built-in regenerative resistor (Note 2, 3) [W] 20 100 100 130 170 Dynamic brake Built-in (Note 4) Communication function USB: Connect a personal computer (MR Configurator2 compatible) RS-422: 1 : n communication (up to 32 axes) (Note 11) Encoder output pulse Compatible (A/B/Z-phase pulse) Analog monitor 2 channels Position control mode Maximum input pulse frequency 4 Mpps (when using differential receiver), 200 kpps (when using open-collector) Positioning feedback pulse Encoder resolution: 22 bits Command pulse multiplying factor Electronic gear A/B multiple, A: 1 to 16777216, B: 1 to 16777216, 1/10 < A/B < 4000 Positioning complete width setting 0 pulse to ±65535 pulses (command pulse unit) Error excessive ±3 rotations Torque limit Set by parameters or external analog input (0 V DC to +10 V DC/maximum torque) Speed control mode Speed control range Analog speed command 1:2000, internal speed command 1:5000 Analog speed command input 0 V DC to ±10 V DC/rated speed (Speed at 10 V is changeable with [Pr. PC12].) Speed fluctuation rate ±0.01% maximum (load fluctuation 0% to 100%), 0% (power fluctuation: ±10%) ±0.2% maximum (ambient temperature: 25 °C ± 10 °C) only when using analog speed command Torque limit Set by parameters or external analog input (0 V DC to +10 V DC/maximum torque) Torque control mode Analog torque command input 0 V DC to ±8 V DC/maximum torque (input impedance: 10 kΩ to 12 kΩ) Speed limit Set by parameters or external analog input (0 V DC to ± 10 V DC/rated speed) Fully closed loop control (Note 10) Available in the future Load-side encoder interface (Note 9) Mitsubishi high-speed serial communication Protective functions Overcurrent shut-off, regenerative overvoltage shut-off, overload shut-off (electronic thermal), servo motor overheat protection, encoder error protection, regenerative error protection, undervoltage protection, instantaneous power failure protection, overspeed protection, error excessive protection Safety function STO (IEC/EN 61800-5-2) Safety performance Standards certified by CB EN ISO 13849-1 Category 3 PL d, EN 61508 SIL 2, EN 62061 SIL CL 2, EN 61800-5-2 SIL 2 Response performance 8 ms or less (STO input OFF → energy shut-off) Test pulse input (STO) (Note 7) Test pulse frequency: 1 Hz to 25 Hz Test pulse off time: 1 ms maximum Mean time to dangerous failure (MTTFd) 100 years or longer Diagnostic coverage (DC) Medium (90% to 99%) Probability of dangerous Failure per Hour (PFH) 1.68 × 10-10 [1/h] Compliance to standards Refer to "Conformity with global standards and regulations" on p. 22 in this catalog. Structure (IP rating) Force cooling, open (IP20) (Note 5) Close mounting Possible (Note 6) Not possible Mass [kg] 1.4 2.1 2.3 4.0 6.2 Khả năng kết nối của biến tần servo MR-J4-A với các loại động cơ Servo Amplifier Rotary Servo Motor Linear Servo Motor (Primary Side) (*1) Direct Drive Motor MR-J4-10A HG-KR053, 13 Available in the future Available in the future HG-MR053, 13 MR-J4-20A HG-KR23 HG-MR23 MR-J4-40A HG-KR43 HG-MR43 MR-J4-60A HG-SR51, 52 MR-J4-70A HG-KR73 HG-MR73 MR-J4-100A HG-SR81, 102 MR-J4-200A HG-SR121, 201, 152, 202 MR-J4-350A HG-SR301, 352 MR-J4-500A HG-SR421, 502 MR-J4-700A HG-SR702 Thông số driver AC servo Mitsubishi MR-J4 Chế độ điều khiển bằng phát xung hoặc truyền thông. Hỗ trợ giác cắm để đọc và ghi chương trình từ máy tính. Hỗ trợ màn hình và phím để cài đặt thông số. Tự động dò tìm thông số tải động cơ. Chế độ driver AC servo Mitsubishi MR-J4 bao gồm vận tốc, vị trí, torque. Ứng dụng của driver servo mitsu MR-J4: Sử dụng driver AC servo Mitsubishi MR-J4 cho máy đóng gói. Ứng dụng cho máy cắt bao bì Dùng trong máy CNC Sửa chữa driver servo Mitsubishi MR-J4 Sửa chữa lỗi driver servo mitsubishi mr-j4 không lên nguồn. Driver bị lỗi quá tải. Thay thế linh kiện igbt, board điều khiển. Hướng dẫn cài đặt servo Mitsubishi MR-J4 Hướng dẫn chạy JOG servo Mitsubishi MR-j4 Để chạy jog servo Mitsubishi mr-j4 các bạn cần phải bật tín hiệu servo ON. Đầu tiên các bạn nhấn phím MODE sau bấm bấm phím XUỐNG để hiện ra “TEST1” sau đó bấm giữ phím SET đến khi màn hình hiển thị d-01 là được. Giờ các bạn bấm phím XUỐNG hoặc LÊN để tiến hành chạy jog tới lùi cho động cơ. Cách cài đặt thông số cho servo Mitsubishi MR-J4 Những thông số cài đặt của servo Mitsubishi thường có dạng XXXX trong đó tính từ phải qua trái các bit sẽ có thứ tự từ 0=>3. Ví dụ như PA01.0 có nghĩa là bit thứ 1 từ bên phải qua. AAAX có nghĩa là có bạn chỉ cần cài bit X mà không cần quan tâm tới 3 bit còn lại. Hướng dẫn cài đặt servo Mitsubishi Mr-j4 chạy chế độ vị trí Về sơ đồ đấu dây các bạn chủ yếu sử dụng 6 dây điều khiển như sau: chân Pulse+ là số 10, chân Pulse- là số 11, Sign+ là số 35, chân Sign- là chân số 36. Lưu ý chân xung hướng của servo nhận xung 5v nên muốn sử dụng với điện áp 24v các bạn cần phải gắn nối tiếp trở 2.2kOhm và chân này. Còn lại nối chân 20 lên +24v và chân 15 và 0V để tạo tín hiệu servo. Chọn chế độ điều khiển điều khiển vị trí: PA01.0=0. Chọn chế độ nhận xung hướng các bạn cài PA13.0, thường mặc định thì cài bit này bằng 0. Cài đặt hộp số điện tử với tử số là PA06 và mẫu số là PA07. Tham khảo bài viết sau để biết cách cài đặt hộp số điện tử: hướng dẫn cài đặt hộp số điện tử cho servo Hướng dẫn cài đặt servo Mitsubishi Mr-j4 chạy ở chế độ điều khiển tốc độ Về sơ đồ đấy dây các bạn sử dụng 2 chân 2-28 để cấp điện áp tham chiếu cho tốc độ. Lưu ý nguồn cấp cho 2 chân này dưới 10V và có điện áp âm. Ví dụ khi điện áp +5v thì servo chạy tới 50% tốc độ max, còn khi điện áp -5V thì servo chạy lùi với tốc độ 50% định mức. Cài đặt PA01.0=2 tức là XX0X để chọn chế độ vị trí. Cài đặt điện áp cho tốc độ tối đa ở Pc12. Ví dụ sử dụng nguồn 10V thì các bạn cài thành 10.00 còn sử dụng nguồn 5V thì các bạn cài thành 5.00. Thời gian tăng giảm tốc các bạn cài ở PC01 và Pc02. Mô tả một số lỗi chi tiết của servo Mitsubishi Mr-j4 AL.32: lỗi quá dòng nguyên nhân có thể do kết nối dây cáp động lực U V W chưa đúng, cảm biến dòng lỗi hoặc hư hỏng igbt board công suất của driver. AL.33: lỗi quá điện áp, đo đặc điện áp cấp nguồn của driver hoặc tăng thời gian tăng giảm tốc cài đặt trên driver hoặc bộ điều khiển. AL.10: lỗi thấp áp, do nguồn đầu vào driver hoặc do driver bị lỗi phần cứng. AL.50 AL.51 : là lỗi quá tải các bạn nên kiểm tra lại đấu nối U V W hoặc do tải quá nặng kiểm tra lại phần cơ khí. AL.16 AL.1`E AL.1F AL.20 AL.21: lỗi chưa kết nối encoder hoặc cáp encoder bị lỏng. Lỗi này cũng có thể do encoder trên motor hi hỏng hoặc jack nhận encoder trên driver bị hỏng.](https://asiame.vn/wp-content/uploads/2020/03/Biến-tần-servo-mitsubishi-MR-J4-300x300.png)


Đánh giá
Chưa có đánh giá nào.