Khái niệm sonar
Sonar (viết tắt từ tiếng Anh: sound navigation and ranging) là một kỹ thuật sử dụng sự lan truyền âm thanh (thường là dưới nước) để tìm đường di chuyển (tức đạo hàng), liên lạc hoặc phát hiện các đối tượng khác ở trên mặt, trong lòng nước hoặc dưới đáy nước, như các cá, tàu bè, vật thể trôi nổi hoặc chìm trong bùn cát đáy, v.v.
Trong một số tác phẩm văn học tiếng Việt còn dịch là sóng âm phản xạ[1]. Tên dịch này bỏ lọt loại sonar chỉ nghe mà không chịu phát ra sóng để phản xạ.
Sonar có thể sử dụng như một phương tiện định vị bằng âm thanh. Việc định vị âm trong không khí đã được sử dụng trước khi có radar. Sonar có thể sử dụng trong không khí cho di chuyển của robot.
Có hai loại sonar:
- Sonar chủ động thì tự phát xung sóng và nghe tiếng vọng lại. Loại này thường được trang bị trên các tàu khu trục, tàu quét mìn, tàu corvette, tàu phóng lôi,…của quân sự (dùng chống tàu ngầm, quét. rà phá thủy lôi) và trên các tàu đánh cá, tàu cứu hộ,… của dân sự
- Sonar bị động (hay sonar thụ động) thì chỉ nghe âm thanh do tàu bè hay nguồn âm khác phát ra. Loại sonar này có tầm hoạt động kém hơn so với sonar chủ động và được trang bị trên tàu ngầm.
Tần số âm thanh sử dụng trong sonar rất rộng, từ hạ âm (infrasonic), âm thanh thường (sonic) đến siêu âm (ultrasonic). Hầu hết Sonar chủ động dùng siêu âm.
Sonar chủ động
Sonar chủ động dùng đầu phát (Transmitter) phát xung sóng, thường được gọi là một “ping“, và nghe tiếng vọng lại ở đầu thu (Receiver). Có nhiều cách bố trí hình học các đầu phát và thu, cho ra cách thức định vị đối tượng khác nhau:
- Nếu phát và thu ở cùng một chỗ, hoạt động của nó là đơn tĩnh (monostatic).
- Nếu phát và thu tách biệt, hoạt động của nó là song tĩnh (bistatic).
- Nếu có nhiều đầu phát (hoặc nhiều đầu thu) ở vị trí tách biệt, hoạt động của nó là đa tĩnh (multistatic).
Hầu hết sonar là đơn tĩnh. Các phao âm thanh (Sonobuoy) có thể được vận hành đa tĩnh.
Xung âm thanh phát ra có thể được bộ phận tạo tia (beamformer) tập trung sóng thành một chùm mạnh. Đôi khi xung âm thanh có thể được tạo ra bằng các phương tiện khác, ví dụ: (1) sử dụng chất nổ, (2) súng hơi (Airgun) hoặc (3) nguồn âm thanh plasma.
Khi thu được tín hiệu phản xạ, sẽ tính được khoảng cách đến đối tượng dựa theo tốc độ truyền âm thanh trong nước, giá trị thô là 1500 m/s. Để có độ chính xác khoảng cách cao hơn, phải đo giá trị đó trong môi trường cụ thể, hoặc tính ra theo quan hệ tốc độ với độ mặn và nhiệt độ.
Nếu các đối tượng ở xa, tín hiệu phản xạ nhỏ, thì người ta dùng kỹ thuật đa tia và đa tần. Xử lý tín hiệu thu (Digital processing) dựa theo khuôn mẫu của tín hiệu phát ra, và so sánh kết quả của các lần phát, sẽ cho ra giá trị tin cậy.
Khi phát xung đơn tần hoặc biến đổi tần trong dải hẹp, thì bằng hiệu ứng Doppler sẽ tính được tốc độ dịch chuyển xuyên tâm của đối tượng.
Khi bố trí nhiều đầu thu và xử lý tín hiệu đồng thời, sẽ định vị được đối tượng. Cách thức bố trí đầu thu xác định vùng định vị tin cậy.
Ngoài tác dụng dò tìm, thì sonar còn dùng cho trao đổi thông tin dưới nước. Thông tin được mã hóa theo cách thức nào đó, và được gửi vào nước.
Sonar thụ động
Sonar thụ động lắng nghe mà không phát tín hiệu. Nó thường được sử dụng trong quân sự, mặc dù nó cũng được sử dụng trong các ứng dụng khoa học, ví dụ để phát hiện cá trong nghiên cứu biển hoặc đánh cá, các vụ nổ mìn ở đảo, để nghe các vụ rung chấn hay phun trào đáy biển. Theo nghĩa rộng Sonar thụ động bao gồm các kỹ thuật phân tích liên quan đến âm thanh phát ra từ xa nhằm tới xác định vị trí và bản chất nguồn phát.
Trong quân sự, hàng loạt đầu thu được bố trí để nghe tín hiệu. Các tín hiệu được xử lý theo Lý thuyết phát hiện tín hiệu để lọc ra tín hiệu quan tâm.
Transponder
Transponder hay máy tiếp sóng hay máy phát đáp, loại dùng trong môi trường nước, là loại sonar chủ động phục vụ chuyển tiếp thông tin cũng như cho định vị
Khi nhận được tín hiệu thì tùy theo cài đặt mà Transponder sẽ thực hiện ngay hoặc có trễ, phát xung chuyển tiếp nguyên mã hoặc phát mã của riêng nó.
Ứng dụng quân sự

Ứng dụng quân sự chiếm phần lớn ứng dụng của sonar. Các máy đo hồi âm được Hải quân Mỹ phát triển năm 1919.[4]
Sonar chủ động được ứng dụng trong các nhiệm vụ:
- Tìm kiếm cứu nạn các phương tiện bị chìm, đắm như tàu, thuyền, máy bay…
- Dò quét mìn, phát hiện thủy lôi
- Tác chiến chống ngầm
- Bảo vệ các căn cứ
Sonar thụ động là phương tiện thu thập thông tin. Các tín hiệu được xử lý theo Lý thuyết phát hiện tín hiệu để lọc ra tín hiệu quan tâm. Có hai dạng xử lý chính:
- Khi quét tương quan tín hiệu giữa các điểm thu, sẽ phát hiện được tín hiệu xuất hiện trong một nhóm. Sự lệch pha tín hiệu giữa các đầu thu cho biết hướng và khoảng cách đến nguồn phát.
- Nhận dạng theo mẫu trong cơ sở dữ liệu âm thanh thì có thể truy tìm ra kiểu nguồn phát. Ví dụ quét tương quan với tín hiệu âm thanh 50 Hz và các hài của tần này, sẽ có thể tìm ra tàu ngầm dùng điện 50 Hz mà không khử rung tốt, và là chỉ báo “không phải tàu của Mỹ” vốn dùng điện 60 Hz. Dàn máy tính mạnh và cơ sở dữ liệu âm thanh đầy đủ, có đủ mẫu các âm thanh tiếng rung khi tàu chạy của từng kiểu tàu, tiếng phóng ngư lôi, tiếng nổ của từng kiểu vũ khí,… đảm bảo cho việc thu thập thông tin tình báo tốt.

Ứng dụng dân sự
Dò tìm cá
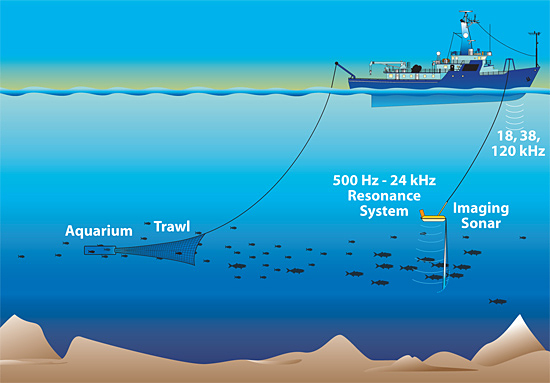
Dò tìm cá sử dụng sonar công suất đủ nhỏ, quét vào khu vực dò tìm. Những con cá đủ lớn có thể cho ra phản xạ nhận thấy được. Đàn cá lớn có thể hiện ra thành đám vật thể có nhiễu do sự bơi lội và làm xáo động nước, dẫn đến xáo động sự lan truyền và phản xạ sóng âm. Ngày nay các phần mềm nhận dạng được ứng dụng để đánh giá sự có mặt và độ lớn của đàn cá trong chùm ảnh quét được.
Ngoài ra, những công ty như eSonar, Raymarine UK, Marport Canada, Wesmar, Furuno, Krupp, and Simrad,… đã chế ra nhiều sonar và dụng cụ âm thanh phục vụ nghề cá biển sâu. Những thiết bị này được gắn vào lưới, thu nhận thông tin và đổi thành dạng số, truyền về máy điều hành trên tàu.
Đo sâu hồi âm
Đo sâu hồi âm (Echo sounding) là một loại sonar nhỏ gọn dùng cho xác định độ sâu nước, bằng cách phát xung siêu âm vào nước và thu nhận tín hiệu phản xạ từ đáy nước, từ đó xác định ra độ sâu. Chúng còn có tên là máy đo sải nước (fathometer).[4]
Thông thường các đầu phát-thu được gắn cạnh tàu thuyền sao cho khi gặp sóng nước thì không lộ ra, phát sóng từ gần mặt nước. Tín hiệu từ đầu thu được theo dõi liên tục, hiện trên màn hình trượt hoặc in băng ghi giấy nhiệt, ở dạng một đường ghi có mã hóa cường độ tín hiệu theo thang độ xám. Băng ghi như vậy hiện ra hình ảnh mặt cắt hồi âm dọc hành trình. Trong trường hợp thuận lợi có thể hiện ra được những ranh giới hay dị vật trong lớp bùn đáy.
Các máy đo sâu hồi âm cỡ nhỏ phục vụ dò tìm luồng lạch cho các loại tàu thuyền. Các máy đo sâu hồi âm kỹ thuật thì phục vụ đo độ sâu và xác định trạng thái đáy nước như bùn, cát, đá, hay thực vật đáy che phủ.

Ứng dụng khoa học
Sonar quét sườn
Sonar quét sườn (Side Scan Sonar), còn gọi là Sonar ảnh sườn (Side imaging sonar), là Sonar phân loại đáy (Bottom classification sonar), là Đo quét sườn, sử dụng ít nhất hai kênh phát-thu siêu âm đặt bên sườn đầu đo dạng con cá (Towfish) kéo theo tàu ở gần sát đáy. Đầu đo có cánh định hướng để nó nằm ngang. Kết quả phản xạ siêu âm sườn được ghi lên giấy ghi nhiệt, cho ra hai hình ảnh hồi âm sườn nhìn từ sát đáy của hành trình đo.[5]
Sonar quét sườn được coi là một phương pháp địa vật lý, sử dụng trong nghiên cứu địa chất biển, và là thành phần không thể thiếu của tàu nghiên cứu biển.
Các cuộc dò tìm vật thể bị chìm ở biển như tàu Titanic, máy bay rơi,… được thực hiện với sự tham gia của Sonar quét sườn.
Lập bản đồ địa hình vùng nước[
Trong việc lập Bản đồ địa hình trên vùng biển hoặc vùng nước nói chung, sonar phục vụ đo độ sâu (Bathymetry) và xác định trạng thái đáy nước, như là đá cứng, dị vật, cát, bùn hay thảm thực vật. Độ sâu được tính chuyển sang độ cao đáy, còn thông tin trạng thái đáy thì được ghi chú hoặc đánh dấu bằng các ký hiệu thích hợp, để biểu diễn trên bản đồ hoặc hải đồ.
Phục vụ cho công việc trên là các máy đo hồi âm kỹ thuật. Máy sử dụng đa tia đa tần. Một số máy có cách thức hoạt động gần như dạng Sonar quét sườn, nhưng có góc quét hẹp hơn để định vị các đối tượng chính xác hơn.
Những máy này làm việc ở hai tần số: tần số thấp 24 hoặc 33 kHz, và tần số cao cỡ 200 kHz. Xung được phát đồng thời, và sự khác nhau về tần số đủ lớn để mạch xử lý tín hiệu tách được chúng với nhau. Tần số 200 kHz dùng cho nghiên cứu chi tiết, phân giải cao đến độ sâu 100 m. Tần số thấp dùng cho độ sâu lớn hơn, trong nghiên cứu biển sâu và đại dương, nhằm tránh sự hấp thụ của nước đối với dao động tần cao trên khoảng cách lớn.
Khi có nhu cầu nghiên cứu chi tiết đáy biển, đặc biệt là vùng có địa hình đáy phức tạp, thì các Sonar quét sườn được sử dụng.
Tác động của sonar đối với sinh vật biển

Các nghiên cứu chỉ ra rằng sóng âm thanh của sonar chủ động phát ra có cường độ tập trung cao, nên tác động đến các sinh vật biển. Biểu hiện rõ nhất là tác động lên họ cá voi, cá heo, là sinh vật dùng biosonar siêu âm để định vị, liên lạc với nhau, và để làm tê liệt con mồi. Sonar của con người làm chúng rối loạn, nhiều khi dẫn đến lạc đường mà chết.
Khi vấp phải sóng của sonar một số loài cá bị loạn hành vi hoặc bị choáng, giống như vấp phải biosonar của cá heo.
Sonar mới hứa hẹn tạo nhiều thay đổi trong việc chinh phục đại dương
Khám phá thế giới dưới mặt biển
Do việc đưa con người lên vũ trụ dễ dàng hơn rất nhiều so với đưa xuống sâu dưới đáy đại dương, các nhà khoa học ước tính, chỉ 5% đại dương của hành tinh chúng ta được khám phá. Cố gắng khắc phục vấn đề này, các thiết bị âm sonar truyền thống đã tạo ra một cuộc cách mạng trong ngành. Tuy nhiên, sonar vẫn có một số hạn chế cố hữu – sóng âm mất hầu như 99,99% năng lượng (tương đương cường độ giảm khoảng một triệu lần) khi truyền từ không khí sang nước và ngược lại – điều khiến sonar không thể sử dụng trên không cho các dự án lập bản đồ đại dương quy mô lớn.
Cho đến nay, các cách duy nhất để sử dụng sonar từ máy bay là thả phao sonar (sonobuoys) xuống nước, hoặc nhúng sonar xuống mặt biển từ trực thăng treo lơ lửng trên không. Trong trường hợp này, máy bay trực thăng không thể tự do di chuyển sang vị trí khác trong khi tác nghiệp với sonar nhúng, vì tại một điểm nó phải nhúng sonar, đo đạc, sau đó nâng thu sonar; bay đến vị trí khác và lặp lại các thao tác đó…v.v.
Để khắc phục các yếu điểm của sonar, các nhà nghiên cứu từ trường Đại học Stanford với sự tài trợ của Hải quân Mỹ đã phát triển Hệ thống Sonar Quang Âm trên không (Photoacoustic Airborne Sonar System – PASS), sử dụng cả ánh sáng và âm thanh để tạo ra hình ảnh chất lượng cao của đáy đại dương từ không trung. Công nghệ mới có thể giúp khảo sát đáy biển (cùng khả năng phát hiện thủy lôi, tàu ngầm và các mục tiêu dưới nước khác) và lập bản đồ từ máy bay liên tục di chuyển.
Nguyên lý hoạt động của PASS
Nhà nghiên cứu Aidan Fitzpatrick của Stanford nói: “Ý tưởng của chúng tôi về công nghệ được đề xuất là ghi lại hình ảnh liên tục khi phương tiện hàng không bay trên mặt nước, “tương tự như phương thức hoạt động của hệ thống radar khẩu độ tổng hợp hoặc hệ thống sonar khẩu độ tổng hợp trong nước hiện có”. Để có được thành công này, PASS tích hợp hai công nghệ tiên tiến: kết hợp cả ánh sáng và âm thanh – cụ thể, sử dụng âm thanh tạo ra bằng tia laze và cảm biến âm thanh đời mới để có được những hình ảnh chất lượng cao về đáy đại dương.
Hiệu ứng quang âm được Alexander Graham Bell phát hiện lần đầu tiên vào cuối những năm 1800, quan sát thấy khi ánh sáng bị một vật hấp thụ và gây ra hiện tượng giãn nở nhiệt. Kết quả là, vật thể phát ra sóng âm thanh, và sóng âm này có thể được ghi nhận bằng cảm biến siêu âm. Tại trường Đại học Stanford, Fitzpatrick và các cộng sự của ông đã sử dụng hiệu ứng quang âm trên nước.
Khi PASS bắn một tia laser với tần số nhất định lên mặt biển, trên bề mặt đại dương xảy ra hiện tượng giãn nở nhiệt nhanh chóng, làm phát ra sóng âm từ bề mặt nước. Ở dưới nước, các sóng âm thanh này hoạt động tương tự như sóng sonar, tác động và phản xạ từ các vật thể, đáy biển, và gửi tín hiệu đến các phương tiện bay không người lái (Unmanned Aerial Vehicle hay Uncrewed Aerial Vehicle – AUV).
PASS sử dụng bộ phát hiện âm thanh có độ nhạy cực kỳ cao để đối phó với việc mất âm thanh khi truyền từ nước vào không khí. Dữ liệu sóng này do các UAV thu được sẽ được xử lý để tạo thành hình ảnh mà con người có thể nhận biết được. Hầu hết các cảm biến âm thanh hiện tại hoạt động dựa trên nguyên lý áp điện, dựa trên gốm sứ, tạo ra điện thế khi âm thanh tác động vào chúng.

PASS sử dụng các cảm biến khác nhau được gọi là đầu dò siêu âm vi cơ điện dung (Capacitive Micromachined Ultrasonic Transducers – CMUT). Về thực chất, đây là những tụ điện được gia công siêu nhỏ bao gồm hai bản mỏng song song, gần nhau. Bất kỳ sự rung động nào của các tấm, chẳng hạn như rung động gây ra bởi sóng âm, đều có thể dễ dàng phát hiện dựa trên sự thay đổi các đặc tính về điện của tụ điện.
Fitzpatrick cho biết, CMUT của họ hiệu quả hơn rất nhiều cho vai trò này so với bộ biến đổi áp điện. “Vì CMUT là thiết bị cơ học chuyển đổi sóng âm thành tín hiệu điện thông qua sự rung động của một tấm rất mỏng khi sóng âm tác động vào tấm màng, nên chúng có hệ số chuyển tiếp rất cao – có nghĩa là chúng có khả năng chuyển đổi phần lớn năng lượng của âm sang năng lượng điện.
CMUT là một phát minh của Stanford, được khám phá bởi giáo sư Butrus Khuri-Yakub, vào giữa những năm 1990. Chúng đã phát triển nhanh chóng và ngày càng được các công ty như Hitachi và Phillips sử dụng phổ biến trong siêu âm y tế. Một ưu điểm của công nghệ là chi phí thấp; có thể có các mảng CMUT lớn và có độ nhạy cao, tương đương với radar mảng quét pha điện tử chủ động (Active Electronically Scanned Array – AESA) trên các máy bay hiện đại.
Nhóm nghiên cứu đã xem xét các phương pháp khác cảm nhận âm thanh từ không khí, bao gồm cả phương pháp đo rung bằng tia laser để phát hiện các rung động âm thanh trên bề mặt nước. Tuy nhiên giải pháp này kém hiệu quả hơn, và đặc biệt là gặp khó khăn khi lọc tín hiệu từ tiếng ồn xung quanh. Bởi vì các CMUT được điều chỉnh để cộng hưởng ở tần số chính xác của xung âm thanh từ xung laser, chúng nhận tín hiệu rõ ràng và loại bỏ tiếng ồn lạ, không liên quan một cách hiệu quả.
PASS nguyên mẫu được tối ưu hóa để lập bản đồ đáy biển có độ phân giải cao, tạo ra một bản đồ ba chiều chi tiết. Hiện tại, các cuộc khảo sát như vậy được thực hiện bằng tàu thủy hoặc tàu ngầm không người lái, một quá trình chậm và tốn nhiều công sức. Khảo sát từ không trung có thể bao phủ các khu vực rộng lớn hơn nhanh chóng hơn nhiều.
Ý tưởng tuyệt vời dù còn nhiều việc phải làm
Cuộc trình diễn đầu tiên của PASS được thực hiện ở quy mô khiêm tốn, với mục tiêu nằm trong một thùng chứa cỡ một chiếc tàu cá được quét bởi một sonar chỉ cách mặt nước vài cm. Nhưng các nhà phát triển không thấy có vấn đề gì đặc biệt khi tăng kích thước của nó ít nhất là bằng kích thước của một chiếc máy bay không người lái bay cao hàng chục mét trên mặt nước và quan sát các vật thể ở độ sâu hàng trăm mét. Sonar PASS sẽ là một thiết bị giá rẻ chỉ nặng vài kg, có thể trang bị cho một đội máy bay không người lái lướt trên biển.

Fitzpatrick lưu ý, nếu yêu cầu duy nhất đối với hệ thống hiện tại là phát hiện (thay vì hình ảnh) – những gì sonar nhúng có thể cung cấp, trong tương lai, sonar PASS có thể sử dụng tần số âm thanh thấp hơn và hoạt động từ thiết bị bay với độ cao lớn hơn nhiều. Các nhà nghiên cứu hiện đang thực hiện các thử nghiệm trong các môi trường lớn hơn, với mục đích có thể chứng minh PASS trong môi trường nước mở.
Đáng nói, vẫn tồn tại một vấn đề nhỏ – sóng điện từ từ PASS vẫn cần phải vượt qua rào cản không khí-nước để được UAV thu nhận. Hiện tại, các sóng điện từ do PASS phát ra vẫn mất khoảng 90% năng lượng, nhưng vẫn hoàn toàn có thể cải tiến. Các nhà nghiên cứu có thể giải quyết vấn đề này một cách hiệu quả nếu họ tìm ra cách gắn một cảm biến nhỏ hơn có thể cảm nhận được sóng âm thanh đến dưới nước. Khi đã sẵn sàng để sản xuất hàng loạt trên quy mô rộng, PASS có thể thay đổi thế giới, các dự án lập bản đồ đại dương quy mô lớn có thể được thực hiện, có thể phát hiện ra các quần thể sinh vật mới và có khả năng tìm ra các loài sinh vật mới.
PASS cũng có thể được sử dụng cho quân sự, nơi nó có thể phát hiện các mối đe dọa dưới nước hoặc tàu ngầm từ trên không. Với tiềm năng của PASS, sự thay đổi trong cuộc chiến chống ngầm có thể diễn ra khá nhanh chóng. Không chỉ vậy, Fitzpatrick còn hình dung hệ thống này sẽ được sử dụng để tìm kiếm máy bay hay tàu bị mất hoặc tàu bị chìm. PASS là một ý tưởng tuyệt vời có thể thay đổi nhận thức của chúng ta về đại dương và thay đổi thế giới trong nhiều năm tới./.
